Por: Irán Gamardo

Sistemas de medición de ángulos y transformaciones entre sistemas.
Para comenzar el siguiente tema recordaremos la definición de ángulo: Es la unión de dos rayos o semirrectas con un mismo origen. A los rayos se le llaman lados y el origen común se llama vértice.

El ángulo en la figura recibe el nombre de MNR, que se escribe simbólicamente como: MNR
Una observación importante:
Cuando un ángulo se ubica en un sistema de coordenadas cartesianas, si su vértice coincide con el origen del sistema y su lado inicial coincide con el semieje positivo de x , se dice que el ángulo está en posición Canónica o Normal. Cuando un ángulo se encuentra en posición normal, la ubicación de su lado final nos indica en que cuadrante del sistema se encuentra ubicado.

Características de los Cuadrantes
Tomando en cuenta la posición normal de un ángulo, se puede conocer fácilmente a que cuadrante pertenece con tan solo conocer su amplitud. Para ello utilizaremos la siguiente relación:
· Los ángulos que pertenecen al primer cuadrante tienen una amplitud mayor de 0º y menor de 90º. Simbólicamente se escribe de la siguiente forma: 0º < α < 90º → α pertenece a Ic
· Los ángulos que pertenecen al segundo cuadrante tienen una amplitud mayor de 90º y menor de 180º. Simbólicamente se escribe de la siguiente forma: 90º < α <180º → α pertenece a IIc
· Los ángulos que pertenecen al tercer cuadrante tienen una amplitud mayor de 180º y menor de 270º. Simbólicamente se escribe de la siguiente forma: 180º < α < 270º → α pertenece a IIIc
· Los ángulos que pertenecen al cuarto cuadrante tienen una amplitud mayor de 270º y menor de 360º. Simbólicamente se escribe de la siguiente forma: 270º < α < 360º → α pertenece a IVc
Signos de Sen(α) y Cos(α) por Cuadrantes.
Según el cuadrante en donde se ubique cada ángulo, los valores del seno y coseno para el mismo tendrán signos particulares, los cuales dependerán del signo que tengan los ejes que conforman al cuadrante. Para ubicarnos mejor, consideraremos la circunferencia unitaria (circunferencia cuyo radio vale 1) inscrita en un sistema de coordenadas.
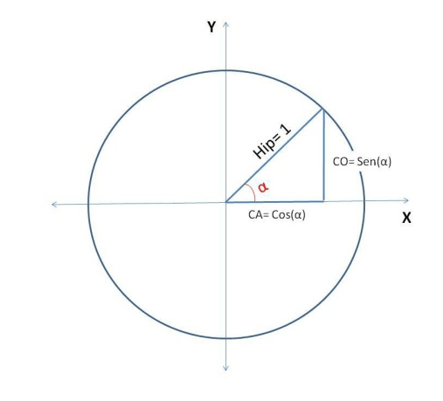
En esta circunferencia trazaremos una línea desde el centro de la misma hasta uno de sus lados, este segmento medirá 1, pues es un radio de la circunferencia. Ahora bien, terminaremos de construir un triangulo rectángulo, cuya hipotenusa sea este radio, por lo que la hipotenusa medirá uno (Hip=1).
En este triángulo rectángulo, la medida del cateto opuesto será el valor del seno del ángulo con que trabajemos, mientras que la medida del cateto adyacente será el valor del coseno del mismo ángulo.
Por lo anterior podemos apreciar que, los valores del seno y el coseno dependen del tamaño de los catetos, y como nos encontramos trabajando en un sistema de coordenadas, diremos que si los catetos se encuentran ubicados en los lados negativos de los ejes, entonces las razones respectivas serán negativas.
De todo lo anterior concluiremos que: el signo del seno se relacionará con el signo de la coordenada en el eje X del punto extremo del lado final del ángulo, mientras que el signo del coseno se relaciona con el signo que tenga la coordenada en el eje Y del mismo punto.
Equivalencias o Reducción de Ángulos al Primer Cuadrante
En un sistema de Coordenadas, podemos hallar ángulos que comparten idénticos valores del seno y el coseno, con la sola diferencia de su signo, que dependerán del cuadrante en que se ubiquen. En esta parte, estaremos hallando las relaciones entre estos ángulos con valores equivalentes del seno y coseno, que se ubiquen en el primer cuadrante, para aquellos ángulos ubicados en el segundo, tercer y cuarto cuadrante, lo haremos de la siguiente manera:
· Si un ángulo β está en el II cuadrante, se puede obtener que: 180° – β = α, siendo α un ángulo del Ic cuadrante: Sen β = Sen (180- β)= Sen(α) y Cos β = -Cos (180 – β)= – Cos(α)
· Si un ángulo β está en el III cuadrante, se puede obtener que 180° + β = α, siendo α un ángulo del Ic cuadrante. Sen β = -Sen (β-180)= -Sen(α) y Cos β = -Cos (β-180)= -Cos(α)
· Si un ángulo β está en el IV cuadrante, se puede obtener que 360° – β = α, siendo α un ángulo del Ic cuadrante. Sen β = -Sen(360-β) = – Sen α y Cos β = Cos(360-β)= Cos α
Sistemas de Medición de Ángulos
1. Sistema Sexagesimal: Es aquel sistema que divide a la circunferencia en 360 partes iguales, llamados grados. Cada grado equivale a 60 minutos (1º= 60’) y cada minuto equivale a 60 segundos (1’=60’’)
Los grados se representan de la forma 35º45’33’’
Es importante señalar que los grados sexagesimales se pueden expresar de forma decimal de la forma 34,344º, la cual se puede transformar a la forma de grados, minutos y segundos.
2. Sistema Centesimal: Es un sistema que divide a la circunferencia en 400 partes iguales llamados grados centesimales. Cada uno de estos grados se encuentran divididos en 100 grados centesimales y cada grado centesimal se divide a su vez en 100 minutos centesimales.
La forma de escribir los grados en este sistema es: 94G75M86S lo que es equivalente a escribir 94,7586G.
3. Sistema Radial o Circular: la unidad de este sistema de medición es el radian.
Un radian no es más que la medida de un ángulo central de una circunferencia cuyo arco mide igual que un radio de dicha circunferencia.
En este sistema radial una circunferencia completa tendrá una medida de 2 radianes, lo que se escribe de la siguiente manera: 2π rad o simplemente 2π.
Transformaciones entre sistemas.
Debido a que el sistema centesimal se encuentra actualmente en desuso, en este capítulo solo nos dedicaremos a hacer transformaciones entre los sistemas sexagesimal y radial.
Antes de iniciar las transformaciones entre sistemas veremos cómo podemos transformar un ángulo sexagesimal expresado en grados, minutos y segundos a la forma decimal, es decir, hallaremos las siguientes equivalencias: 35º13’30’’= 35,225. El procedimiento será el siguiente:
| 35º13’30’ =35,00000 13’/60= 0,2166730’’/3600=0,008333Total= 35,225003Redondeando=35,225º | Transformaremos por separado los minutos y segundos a grados, esto lo haremos dividiendo los minutos entre 60 (debido a que cada grado equivale a 60 minutos) y dividiremos los segundos por 3600 (también debido a que un grado equivale a 3600 segundos) luego sumaremos estos dos resultados y los grados del ángulo original. |
También podemos transformar de forma inversa, es decir, podemos llevar un ángulo expresado de forma decimal a la forma sexagesimal, el procedimiento será el siguiente:
| 35,225º0,225×60= 13,5’0,5x60= 30’’Así quedará: 35º13’30’’ | En este caso, tomaremos la parte decimal del ángulo y la multiplicaremos por 60 para expresarla en segundo, la parte entera del resultad serán los minutos del ángulo resultante, pero con la parte decimal seguiremos trabajando, multiplicándola por 60 nuevamente, para hallar los segundos. Al final escribiremos los grados (que teníamos previamente) los minutos (obtenidos en este procedimiento) y los segundos (también obtenidos en este procedimiento) |
Transformación de amplitudes de ángulos, del sistema sexagesimal al sistema radial.
| Sabemos que 35º13’30’’= 35,225ºAhora haremos35,225ºx(π/180º)= 0,196π radSiempre que sea posible, debemos expresar los resultados como fracción | Conocer como transformar un ángulo en el sistema sexagesimal a su expresión decimal es primordial para la transformación entre estos sistemas, pues éste es el primer paso para hallar esta equivalencia. Una vez realizado tal paso, multiplicaremos este ángulo por la fracción: π/180º, y de ser posible expresaremos su resultado en base a fracciones (esto es posible, generalmente, cuando el ángulo es exacto, es decir, el ángulo son de la forma: 60º, 225º, 75º, 90º sin minutos ni segundos o expresión decimal. |
Transformación de amplitudes de ángulos, del sistema radial al sistema sexagesimal
| Ejemplo:Expresar 3/4π rad a grados sexagesimales3/4π x(180º/π)= 135º | Cuando queramos expresar un ángulo radial al sistema sexagesimal, solamente debemos multiplicar dicho ángulo por la fracción siguiente: (180º/π), con lo cual se eliminará el signo π. |
